Crash simulation finally gets its benchmark
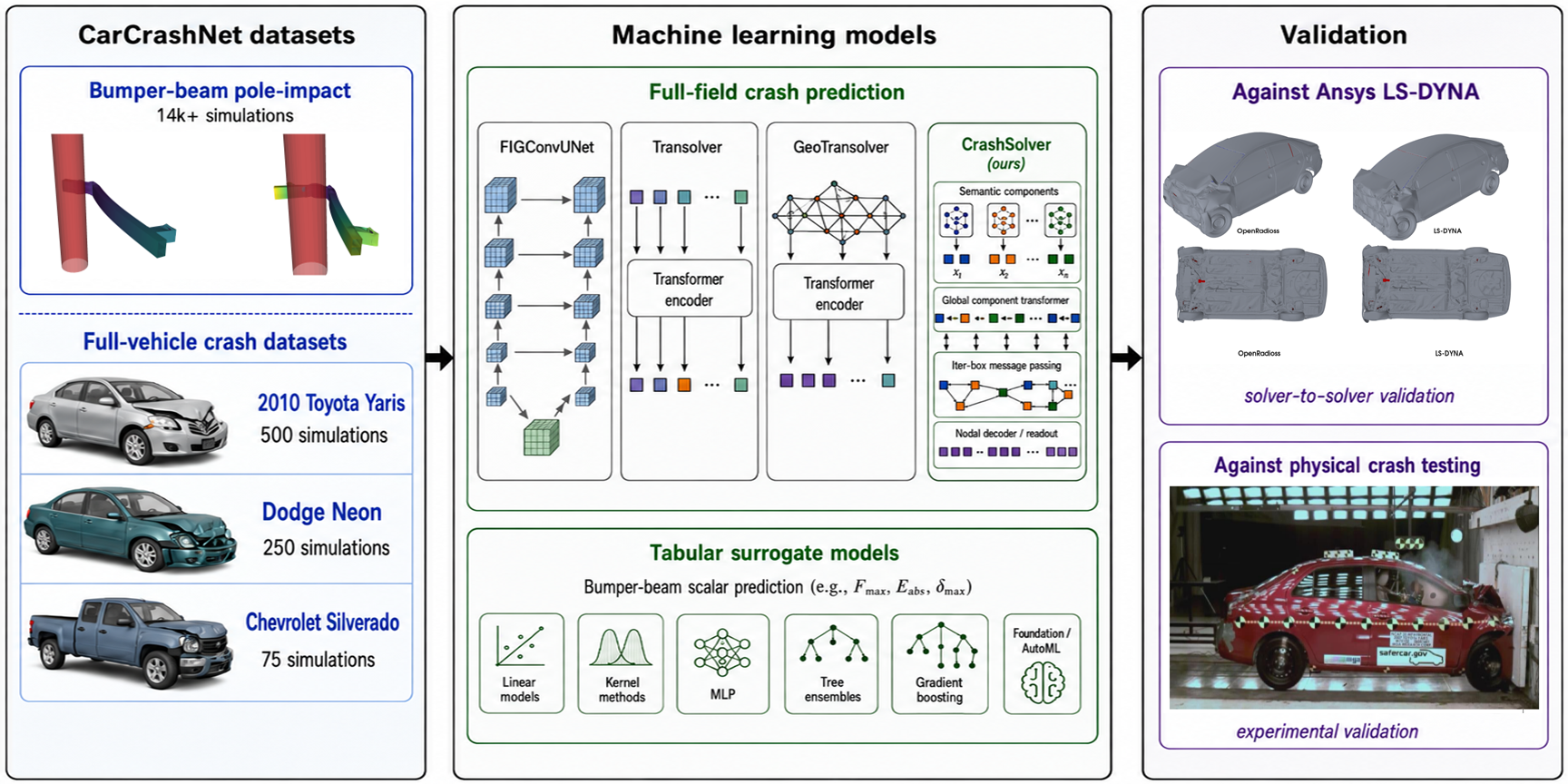
Structural crash simulation governs vehicle safety, yet the field has lacked the open, validated, large-scale benchmarks that fueled progress in fluid dynamics, weather, and atomistic modeling. CarCrashNet closes that gap: the first public, high-fidelity benchmark for data-driven crash simulation, pairing component-scale and full-vehicle finite-element data with CrashSolver, a hierarchical neural solver that sets state of the art on every released benchmark.
Open-source physics you can trust
Dataset credibility comes first: the OpenRadioss workflow is validated head-to-head against the industry-standard commercial solver Ansys LS-DYNA on the detailed Toyota Yaris model — agreeing within 7.2% on peak wall force, 2.6% on wall-force duration, and 0.5% on peak internal energy — and benchmarked against published physical crash-test references.
Two corpora, two scales of complexity
Bumper-beam pole impacts
14,742 component-scale simulations of a DP1000 bumper beam + DP600 crash-box assembly. Seven design variables — velocity, thicknesses, yield strengths, pole diameter and offset — sampled with a scrambled Sobol DOE.
14,742 simulationsFull-vehicle crashes
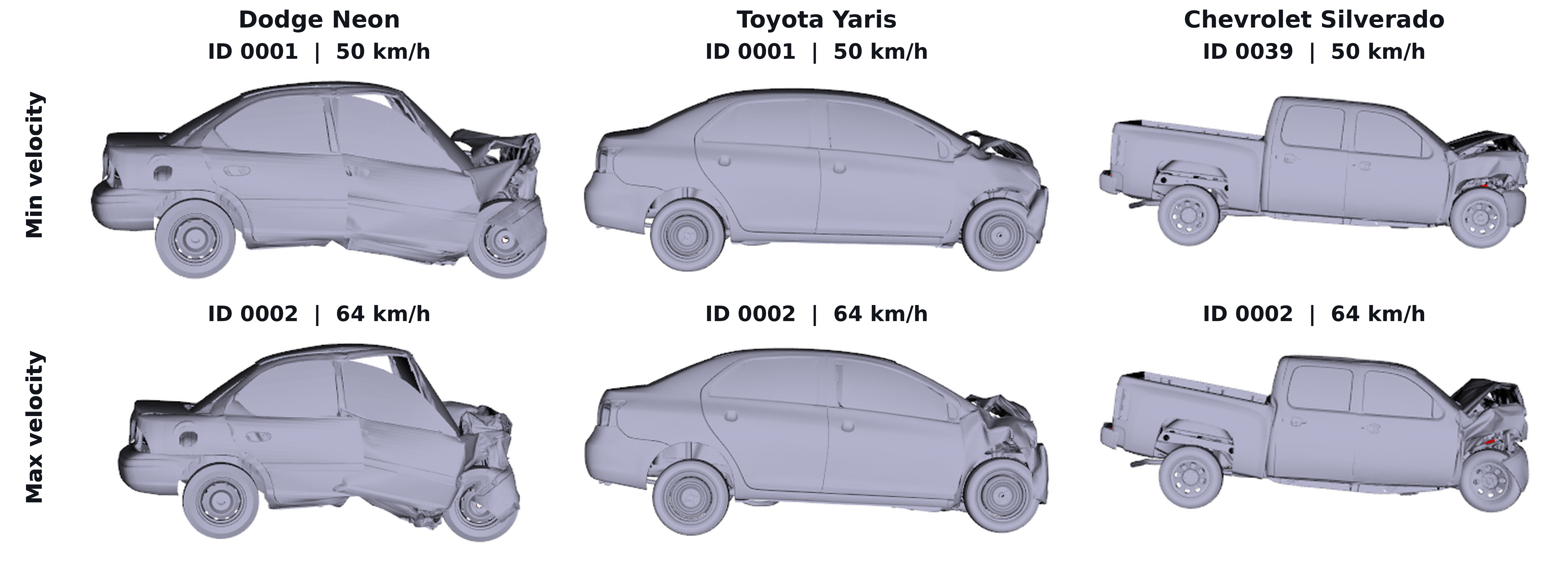
825 explicit FE simulations across three industry-standard models of increasing complexity: Toyota Yaris (500), Dodge Neon (250), Chevrolet Silverado (75), varying impact velocity and structural shell thicknesses.
825 simulations · 3 vehiclesML-ready everything
Full-field VTKHDF trajectories (displacement, velocity, stress, plastic strain, erosion), global and local time histories, and reduced crashworthiness scalars for every single case.
Multi-modal · mesh-resolved
A neural solver that thinks in parts, not points
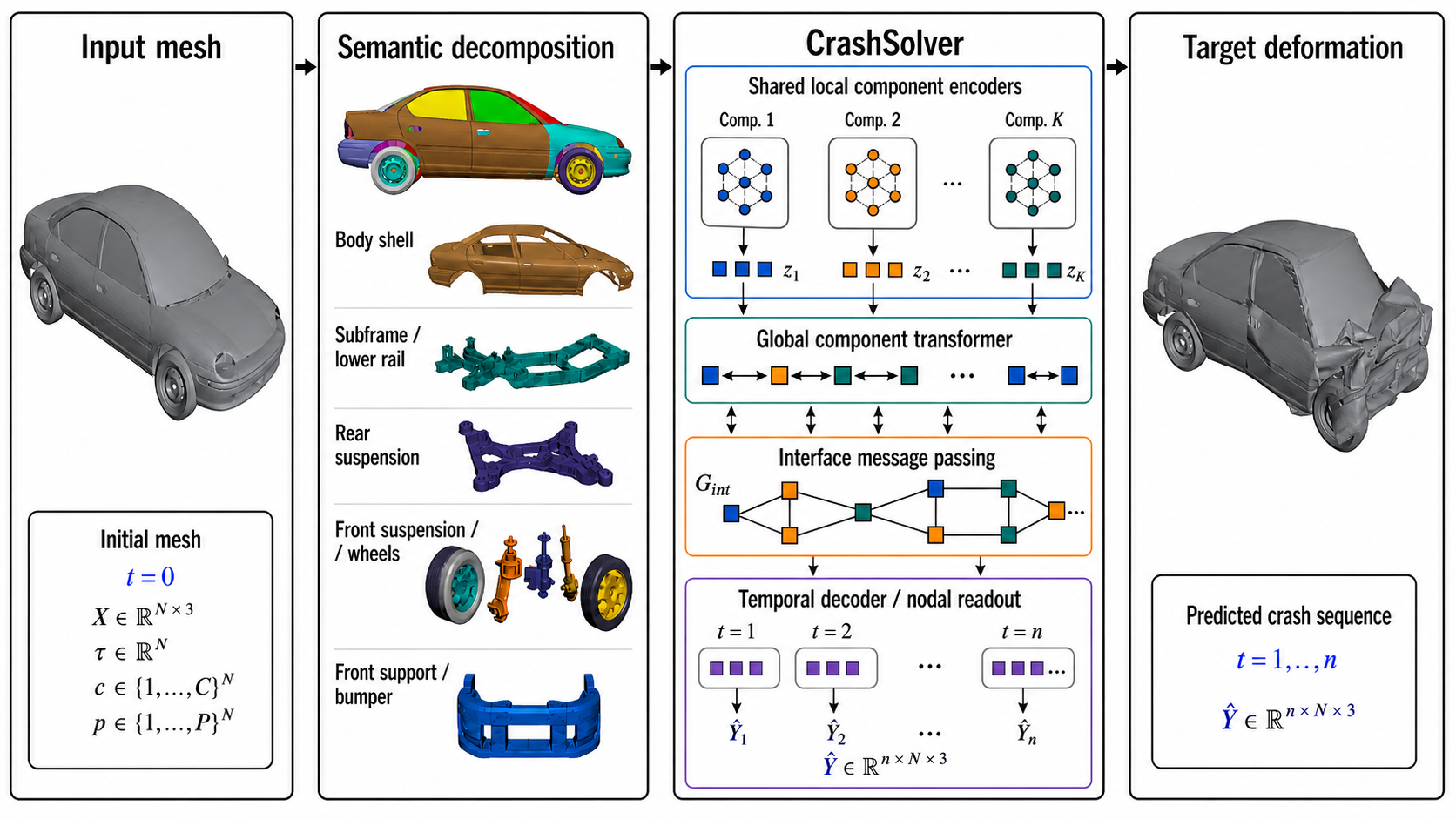
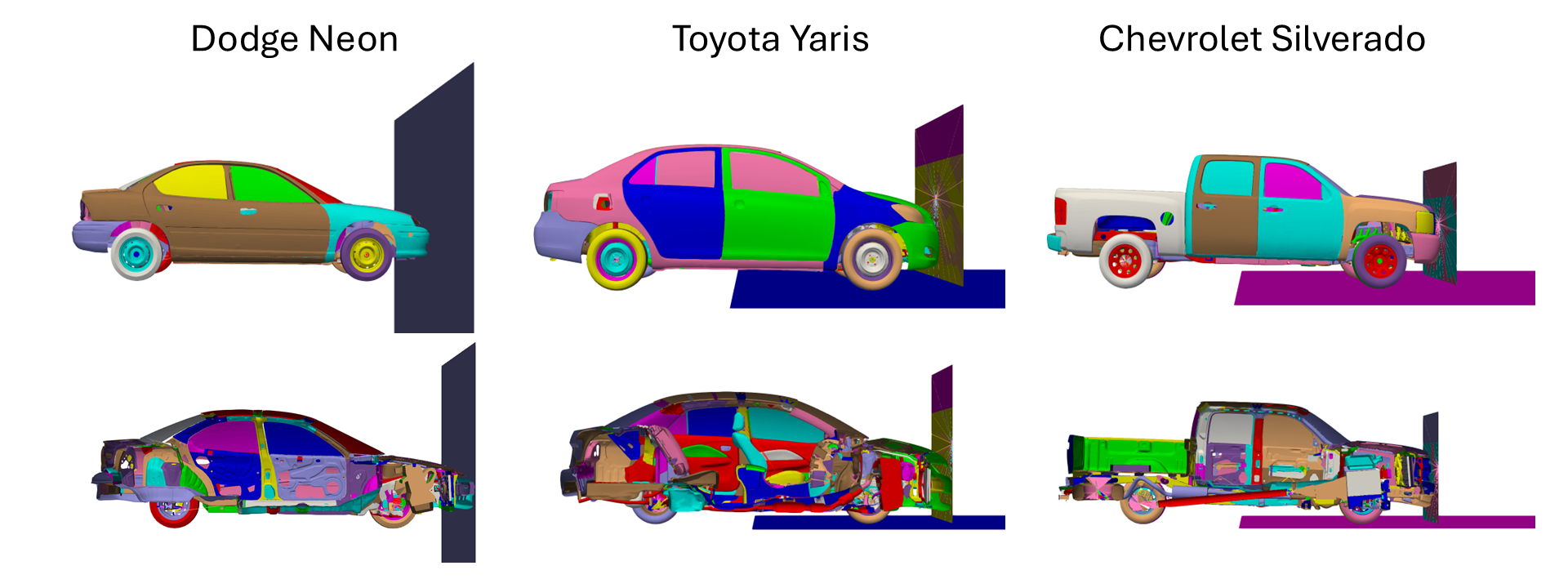
Vehicles crash along structural load paths, not as monolithic point clouds. CrashSolver exploits the finite-element part hierarchy as an inductive bias: semantic decomposition into structural groups, shared local component encoders, a global component transformer, mesh-derived interface message passing, and a temporal decoder that emits the full crash displacement trajectory.
Lowest error on every metric, on every vehicle
On the unseen hidden test set of each vehicle benchmark, CrashSolver beats Transolver, GeoTransolver, and FIGConvUNet across the board — and its advantage grows with structural complexity: on the Silverado pickup, RMSE drops by ~22% versus the strongest baseline.
| Dataset | Model | RMSE (mm) ↓ | MAE (mm) ↓ | Rel. L₂ (pos) ↓ | Rel. L₂ (disp) ↓ |
|---|---|---|---|---|---|
| Dodge Neon | CrashSolver | 32.763 | 18.036 | 0.02499 | 0.08837 |
| Transolver | 33.947 | 18.678 | 0.02589 | 0.09148 | |
| Toyota Yaris | CrashSolver | 21.769 | 13.507 | 0.01537 | 0.09043 |
| GeoTransolver | 21.773 | 13.359 | 0.01537 | 0.09059 | |
| Chevrolet Silverado | CrashSolver | 61.536 | 37.753 | 0.03143 | 0.17069 |
| GeoTransolver | 79.230 | 45.366 | 0.04049 | 0.21844 |
Citation
@article{elrefaie2026carcrashnet,
title = {CarCrashNet: A Large-Scale Dataset and Hierarchical Neural Solver
for Data-Driven Structural Crash Simulation},
author = {Elrefaie, Mohamed and Shu, Dule and Klenk, Matt and Ahmed, Faez},
journal = {arXiv preprint arXiv:2605.07098},
year = {2026}
}